Arbeitsprinzip:
Der inkrementale Drehgeber arbeitet, indem er die Zeit- und Phasenkorrelation seiner winkelcodierten Scheibe über zwei interne lichtempfindliche Empfangselemente übersetzt. Diese Übersetzung erleichtert die Bestimmung von Winkelverschiebungsänderungen, die entweder zu positiven (inkrementellen) oder negativen (dekrementellen) Änderungen führen.
Interner Mechanismus (Richtungsbestimmung):
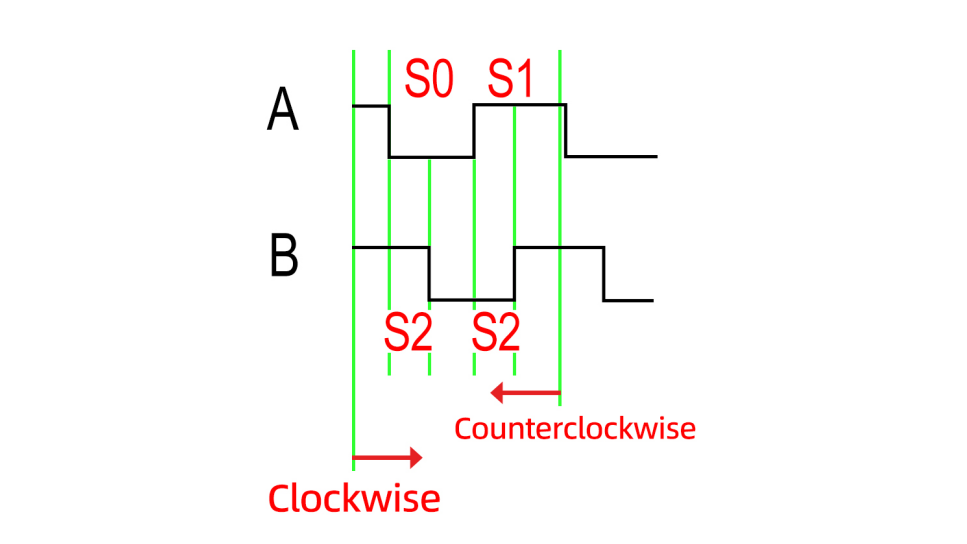
Der AB-Phasendrehgeber enthält zwei Sätze von Fotokopplern, die zwei unterschiedliche Impulsfolgen mit einem Phasenunterschied von 90° erzeugen. Die Vor- und Nachlaufbeziehungen der Impulsfolge kehren sich um, wenn der Drehgeber vorwärts oder rückwärts gedreht wird.
Bei der Vorwärtsdrehung steht die Polarität des A-Phasen-Impulses der Polarität des B-Phasen-Impulses genau bei der steigenden Flanke des B-Phasen-Impulses gegenüber. Bei der Rückwärtsdrehung bleibt dieser Polaritätskontrast erhalten. Durch den Einsatz des AB-Phasengebers kann die speicherprogrammierbare Steuerung (SPS) die Drehrichtung der Welle leicht feststellen. Siehe das folgende Schaltbild:
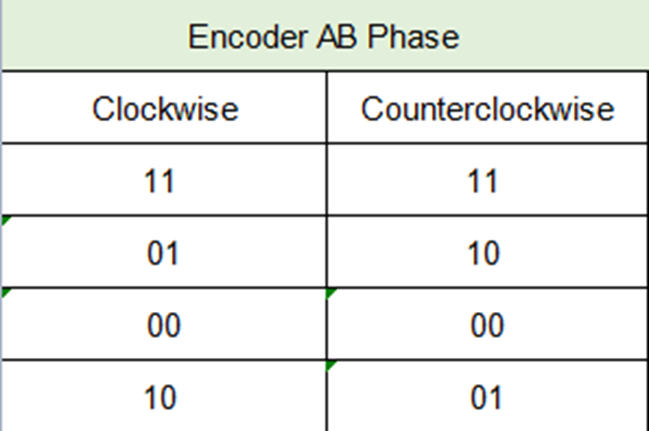
Aus der obigen Tabelle lassen sich die folgenden Schlussfolgerungen ziehen:
Die AB-Phasencodes unterscheiden sich für Vorwärts- und Rückwärtsdrehungen. Die Kenntnis des aktuellen und des nachfolgenden AB-Phasencodes ermöglicht die Bestimmung der Drehrichtung des Drehgebers.
Berechnung der Entfernung:
Ein erfasster Drehgeber verfügt über bestimmte Parameter: Drehgeberauflösung (Impulse pro Umdrehung) und Umfang (Umfang einer einzelnen Umdrehung).
Der einem Impuls zugeordnete Abstand = Encoderauflösung / Umfang.
Daraus ergibt sich: Drehweg = Impulszahl * Encoderauflösung / Umfang.
Um die Genauigkeit zu erhöhen und den Fehler zu minimieren, ist es plausibel, eine feste Impulslänge zu verlangen:
Benötigte Impulse für eine feste Länge = feste Länge * Umfang / Encoderauflösung.
Ansatz für die Implementierung (STM32-Programmierung):
Dieses Implementierungskonzept setzt die Vertrautheit mit STM32 External Interrupts (Unterbrechung durch steigende oder fallende Flanke) voraus.
1. Ein externer Interrupt wird eingesetzt, um die steigende (oder fallende) Flanke der Phase A oder B zu erfassen. Diese Aktion löst einen Interrupt aus, der zum Eintritt in eine Interrupt-Service-Routine führt.
2. Der Code der Unterbrechungsroutine erfüllt folgende Aufgaben: Bestimmung des Pegels der Phase B oder A (zur Feststellung der Vorwärts- oder Rückwärtsdrehung).
Anschauliches Beispiel:
In diesem Beispiel erfasst ein Interrupt die steigende Flanke der Phase A.
Nach der Erfassung der steigenden Flanke der Phase A wird die Polarität der Phase B ermittelt (siehe Diagramm).
Eine niedrige Polarität in Phase B bedeutet eine Vorwärtsdrehung (im Uhrzeigersinn), während eine hohe Polarität eine Rückwärtsdrehung (gegen den Uhrzeigersinn) bedeutet.
Nach der Richtungsbestimmung wird eine inkrementelle Anpassung auf die entsprechende Impulsformel angewandt, die anschließend die Entfernungsberechnung ermöglicht.
Für die Geschwindigkeitsberechnung wird der Einsatz eines Zeitgebers empfohlen.
Dieser hochentwickelte und umfassende Ansatz gewährleistet eine genaue Messung und Analyse der Rotationseigenschaften des Inkrementalgebers und ermöglicht eine präzise Bewegungsüberwachung und -steuerung.


